NIMC2000N-B 运动控制器(CODESYS软件平台) | ||
 | NIMC2000N系列运动控制器是北京立迈胜控制技术有限责任公司最新推出的新一代 PLC型运动控制器,结合现代控制技术在工业控制中的理念,NIMC2000N整合了CODESYS V3 控制平台、PLC 功能、运动控制(motion control)功能在同一硬件设备中;该控制器支持 PLC 全部编程方式、逻辑控制功能及多种运动控制算法。 | |
特点● ARM Cortex A8处理器 ● 支持CODESYS V3编程平台 ● 支持MODBUS、CANopen、EtherCAT等总线扩展 ● 支持标准PLC的六种编程语言,简单易用 ● 支持使用PLC编程的运动控制功能,调试、编程简单方便 | ||

 | 硬件规格 | |
| 硬件规格硬件型号 | NIMC2000N-B03 | |
| 外形尺寸 | 160 × 110 × 35mm | |
| 安装方式 | 导轨安装、 螺丝安装 | |
| 重量 | 550g | |
| 外壳材质 | 镀锌冷板(CGCC) | |
| 电源要求 | ||
| 额定电压/电压范围 | 24 VDC/(18~32VDC) | |
| 内部功耗 | 5W | |
| 保险丝 | 内置直流可恢复保险丝 | |
| 硬件配置 | ||
| 处理器 | ARM Cortex A8 800MHz 256KB L2 cache | |
| 内存 | 512MB | |
| 闪存 | 8GB eMMC | |
| 通信端口 | ||
| RS232端口数量 | 2路, 非隔离 | |
| RS485端口数量 | 1路, 隔离 | |
| CAN端口数量 | 2路, 隔离 | |
| 以太网端口数量 | 1 | |
| USB端口数量 | 2 | |
| 本地IO | ||
| DI | 6路;DI0~5: PNP/NPN,光电隔离 | |
| DO(两个版本不同) | 2路;NPN;光电隔离 | |
| PWM输出 | 不支持 | |
| AI通道 | 不支持 | |
| AO通道 | 不支持 | |
| 其它 | ||
| SD卡 | 支持 | |
| 掉电保存 | 不支持 | |
| RTC时间 | 支持 | |
| 工作温度 | -10℃~+60℃ | |
| 环境温度 | -20℃~+70℃ | |
| 湿度 | 5%~85%RH 无冷凝 | |
| 软件规格 | |
| 软件规格产品型号 | NIMC2000N-B03 | |
| 操作系统 | Debian 9.1 | |
| 系统内核 | Linux 4.9.45 + RT-Preempt实时补丁 | |
| PLC软件 | CodeSys V3.5 | |
| 编程语言 | ||
| 指令表IL | √ | |
| 结构化文本ST | √ | |
| 梯形图LD | √ | |
| 顺序流程图SFC | √ | |
| 功能块图FBD | √ | |
| 连续功能图CFC | √ | |
| 通信协议 | ||
| Modbus RTU主、 从 | √ | |
| Modbus TCP主、 从 | √ | |
| CANopen 主、 从 | √ | |
| EtherCAT主站 | √ | |
| Profinet控制器、 设备 | √ | |
| EtherNet/IP 扫描仪、 适配器 | √ | |
| OPC UA服务器 | √ | |
| OPC UA客户端 | √ | |
| 自定义串口通信协议 | √ | |
| 自定义CAN通信协议 | √ | |
| 自定义TCP、 UDP协议 | √ | |
| 运动控制库 | ||
| NiM_SML | √ | |
| NiM_SMB | √ | |
| NiM_Robotics | √ | |
| SML_Basic | × | |
| SM3_Basic | √ | |
| SM3_Robotics | √ | |
| SM3_CNC | √ | |
| 运动控制库介绍 | |
| NiM_SML | 立迈胜自研轻量单轴运动控制库 支持CANopen通信、 EtherCAT、Modbus通信的Cia402轴 支持轮廓位置PP、 轮廓速度PV、 轮廓转矩PT、 原点回归HM等4种控制模式 控制器仅向电机发生控制指令并监视运行状态, 无需进行速度规划, 无需每个控制周期都跟电机通信; 可以使用较低的CPU负荷和总线负荷控制大量轴; | |
| NiM_SMB | 立迈胜自研轻量单轴运动控制库 支持CANopen通信、 EtherCAT通信的Cia402轴 支持循环同步位置CSP、 循环同步速度CSV两种控制模式 控制器进行速度规划, 每个控制周期将规划的位置/速度发生给电机, 相较于NiM_SML控制器CPU负荷、 总线负荷都较大 支持位置控制、 速度控制、 点动、 运动叠加, 支持电子齿轮、 电子凸轮同步 | |
| NiM_Robotics | 立迈胜自研机器人运动控制库 以NiM_SMB为基础 支持点到点运动、 空间直线运动、 空间圆弧运动, 支持常见的龙门、 Delta、 Scara等机器人构型, 支持世界坐标系、 机器坐标系、 产品坐标系及关节坐标系之间的坐标变换 | |
| SML_Basic | CodeSys轻量单轴运动控制库 支持CANopen通信、 EtherCAT通信的Cia402轴 支持轮廓位置PP、 轮廓速度PV、 原点回归HM等3种控制模式 控制器仅向电机发生控制指令并监视运行状态, 无需进行速度规划, 无需每个控制周期都跟电机通信; 可以使用较低的CPU负荷和总线负荷控制大量轴; | |
| SM3_Basic | CodeSys轻量单轴运动控制库 支持CANopen通信、 EtherCAT通信的Cia402轴 支持循环同步位置CSP、 循环同步速度CSV两种控制模式 控制器进行速度规划, 每个控制周期将规划的位置/速度发生给电机, 相较于NiM_SML控制器CPU负荷、 总线负荷都较大 支持位置控制、 速度控制、 点动、 运动叠加, 支持电子齿轮、 电子凸轮同步; 提供可视化的凸轮表编辑器 | |
| SM3_Robotics | CodeSys机器人运动控制库 以SM3_Basic为基础 支持点到点运动、 空间直线运动、 空间圆弧运动, 支持多种运动过度模式和速度混成; 支持常见的龙门、 Delta、 Scara等机器人构型, 支持世界坐标系、 机器坐标系、 产品坐标系及关节坐标系之间的坐标变换; 提供可视化的机器人轴组配置界面 | |
| SM3_CNC | CodeSys CNC运动控制库 以SM3_Basic为基础 支持G代码解释执行, 支持多种轨迹优化算法, 支持常见的龙门、 Delta、 Scara等机器人构型, 支持世界坐标系、 机器坐标系、 产品坐标系及关节坐标系之间的坐标变换;提供可视化的G代码编辑器 | |
| 外观图纸 |
|


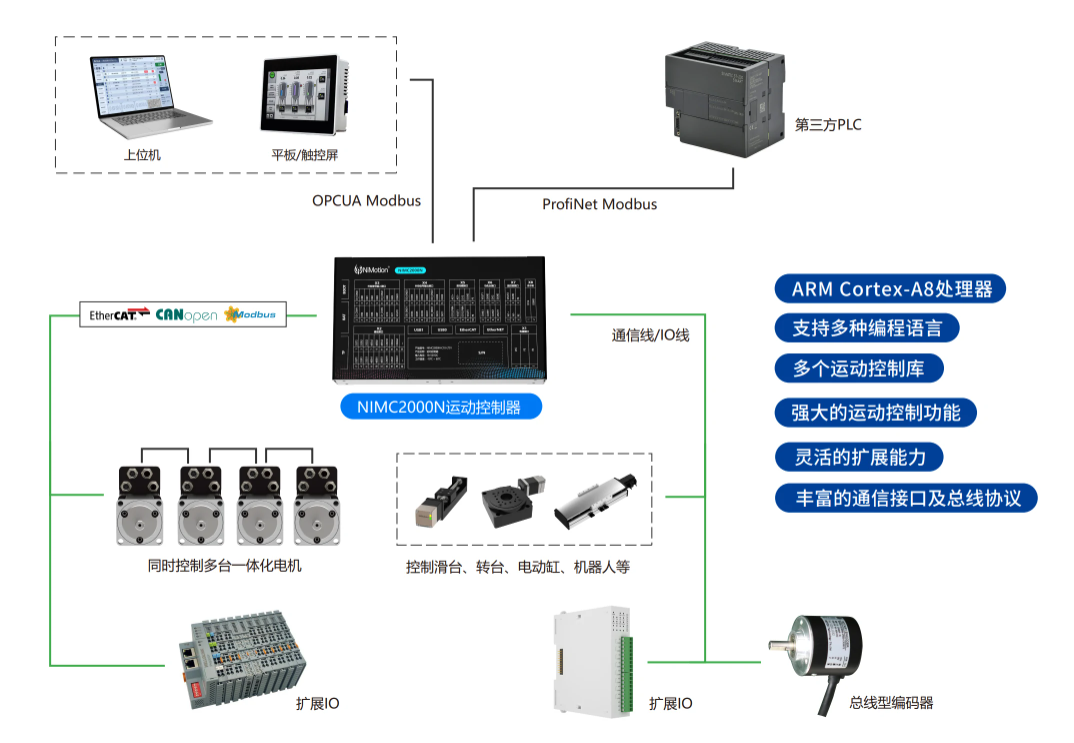
| 控制器组网图 |
|